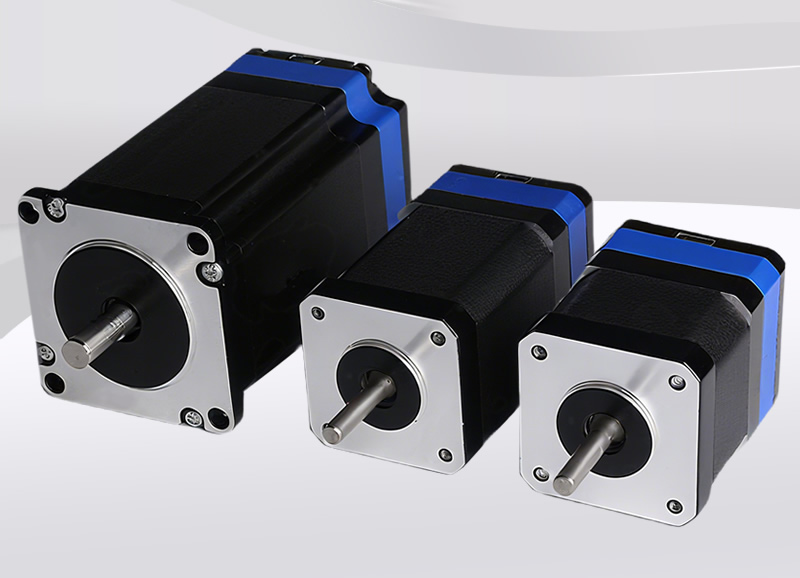
A stepper motor converts an electrical pulse into an angular motion. It is useful for applications requiring open loop position control.
There are three categories of stepper motors:
The variable reluctance motor: With the same electrical characteristics, this type of motor is less powerful but faster than a permanent magnet motor.
The permanent magnet motor: it is a low cost, low resolution motor
average (up to 100 steps/revolution).
The hybrid motor: this type of motor combines the two previous types of technology but is more
expensive. It has the advantage of better torque and higher speed. It has a resolution of 100 to 400 steps/revolution.
Permanent magnet and hybrid motors are the most commonly used motors because they have certain advantages:
They are accurate
They are inexpensive
They are sturdy
Simple construction
The torque is high at start-up and at low speeds
However, they also have some disadvantages:
The speed and torque are relatively low
Torque decreases sharply as speed increases
They generate vibrations that can create resonance problems
There is a risk of overheating
When selecting a stepper motor, it is important to take into account:
Torque and load
The number of steps
The dimensions of the motor (weight, mounting flanges, etc.).
Cost
 Company Profile
Company Profile