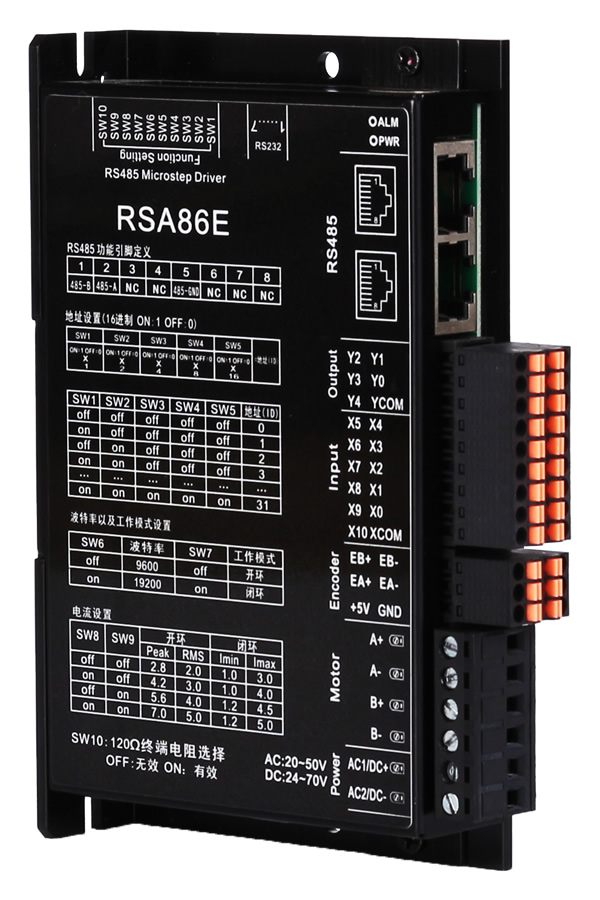
The 485 bus open-closed loop stepper driver is the latest digital hybrid stepper servo driver with serial port debugging function. It integrates the MODBUS-RTU standard protocol specification and the communication network port adopts the standard RJ45 interface. Users can set various parameters such as subdivision, current, speed, working mode, etc. through the host computer debugging software, which greatly enriches the practical functions of the product and can meet the application needs of most occasions.
The 485 bus-based open- and closed-loop stepper driver utilizes a servo-like control principle, combining the advantages of both open-loop stepper and servo systems. It employs the latest 32-bit DSP control technology, significantly improving stepper system performance. It offers excellent stability and ultra-low noise at both medium and low speeds, while significantly increasing high-speed torque, expanding the speed range of stepper motors. Smooth, precise pure sinusoidal current vector control effectively reduces motor heating, and its high compatibility and cost-effectiveness make it suitable for most applications.
illustrate | 485 bus type open and closed loop driver | |||
Minimum | Typical values | Maximum | unit | |
Output current | 0 | - | 6000 | mA |
Input power voltage | 20 | - | 50 | VAC |
twenty four | 36 | 70 | VDC | |
Control signal input current | 7 | 10 | 16 | mA |
Insulation resistance | 50 | - | - | MΩ |
Cooling method | Natural cooling, fan cooling | |
Usage Environment | occasion | Do not place it near other heating equipment. Avoid dust, oil mist, corrosive gas, high humidity and strong vibration. Flammable gas and conductive dust are prohibited. |
temperature | -25℃~55℃ | |
humidity | 40~90%RH | |
vibration | 10~55Hz/0.15mm | |
Storage temperature | -25℃~65℃ | |
| Two-phase Digital 485 Bus Type Open/Closed Loop Stepper Motor Driver | RSA28E | AC(20~50)/DC(24~70) | 185 | 20/28/35/39 | |||
| RSA57E | AC(20~50)/DC(24~70) | 195 | 42/57/60 | ||||
| RSA86E | AC(20~50)/DC(24~70) | 195 | 57/60/86 | ||||
 Company Profile
Company Profile