The hybrid digital stepper driver is controlled by the latest 32-bit ARM processor. This digital driver has peripheral subdivision, current, and auxiliary function dialing, which users can freely set according to their needs. Advanced drive control algorithms are written internally to ensure precise and stable operation of the stepper motor in various speed ranges. The built-in subdivision algorithm enables the motor to run smoothly at low speeds; The medium to high speed torque compensation algorithm can maximize the torque of the motor at medium to high speeds; Parameter self-tuning algorithm, capable of adapting to various motors and maximizing motor performance; Built in smoothing algorithm can greatly improve the acceleration and deceleration performance of the motor.
1. Productfeature
2. Electrical indicators
Instructions | DM422 | |||
minimum | typical value | maximum | unit | |
output current | zero point three | - | two point two | A |
Input power supply voltage | twenty | twenty-four | forty | VDC |
Control signal input current | seven | ten | sixteen | mA |
Step pulse frequency | 0 | - | two hundred | KHz |
insulation resistance | fifty |
|
| MΩ |
three Usage environment and parameters
cooling method | Natural cooling, fan cooling | |
Usage environment | occasion | Cannot be placed next to other heat generating equipment. Avoid dust, oil mist, corrosive gases, high humidity, and strong vibration areas. Combustible gases and conductive dust are prohibited |
temperature | 0——fifty℃ | |
humidity | forty—90%RH | |
vibration | 10~55Hz/0.15mm | |
storage temperature | -20℃~65℃ | |
status indicator
greenLEDFor the power indicator light, when the driver is powered on, theLEDAlways on; When the drive is powered off, theLEDExtinguish.
redLEDAs a fault indicator light, when a fault occurs, this indicator light willthreeFlashing in cycles of seconds; When the fault is eliminated by the user, redLEDConstant extinction. redLEDatthreeThe number of flashes per second represents different fault information, and the specific relationship is shown in the following table:
serial number | Number of flashes | redLEDFlashing waveform | Fault Description |
one | two |
| Overvoltage fault (voltage)>DC40V) |
two | three |
| Undervoltage fault (voltage)<DC20V) |
three | five |
| Motor open circuit (phase loss) |
Common problems and troubleshooting
1)Control signal interface
name | function |
PUL+ | Pulse control signal:+5V-+24VBoth can be driven, and the rising edge is effective. Whenever the pulse changes from high to low, the motor takes one micro step. In order to reliably respond to pulse signals, the pulse width should be greater thantwoMs. |
PUL | |
DIR+ | Direction control signal:+5V-+24VCan be driven, high/Low level signal.To ensure reliable commutation of the motor, the direction signal should be at least prior to the pulse signalfiveMsEstablish. The initial operating direction of the motor is related to the motor wiring, and any phase winding can be interchanged (e.gA+TheA-Exchange can change the initial direction of motor operation. |
DIR | |
MF+ | Enable control signal:+5V-+24VCan be driven, high/Low level signal. Used to enable or disable the operation of motors. whenOne +pick up+5V,One -When connected to a low level, the driver will cut off the current of each phase of the motor to put it in a free state, and the step pulse will not be responded to at this time. When this function is not needed, the enable signal terminal can be suspended. |
MF- |
2)Strong electrical interface
name | function |
V- | DC power supply ground |
V+ | Positive pole of power supply, range:DC20~80V,VAC20-110V |
A+TheA- | motorAPhase coil |
B+TheB- | motorBPhase coil |
GRMOT Stepper Motor and Driver Model Matching Table:

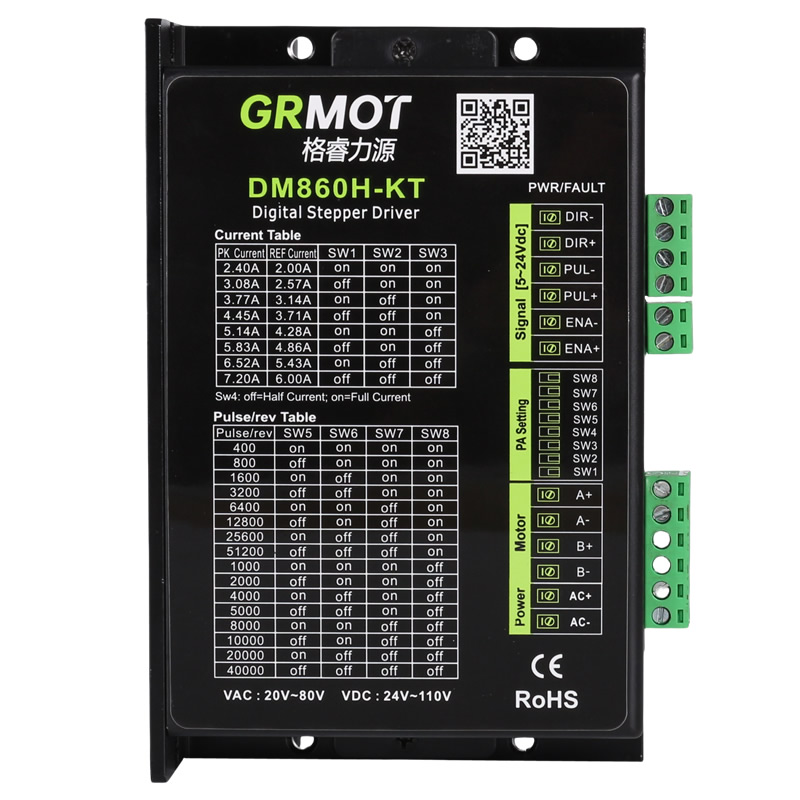
The DM860H-KT driver uses an 8-bit DIP switch, SW1-SW3 are used to set the current; SW4 selects full current or half current lock; SW5-SW8 are used for subdivision settings. The detailed description is as follows:
SW1 | SW2 | SW3 | SW4 | SW5 | SW6 | SW7 | SW8 |
Current setting | Semi-stream | Segment settings | |||||
1. Current setting
Output peak current | Output effective current | SW1 | SW2 | SW3 | Current self-setting |
2.40 | 1.71 | on | on | on | When SW1, SW2, and SW3 are all off, the required effective current value can be set through the PC software. The maximum value is 6000mA and the resolution is 1mA. |
3.08 | 2.20 | off | on | on | |
3.77 | 2.69 | on | off | on | |
4.45 | 3.18 | off | off | on | |
5.14 | 3.67 | on | on | off | |
5.83 | 4.16 | off | on | off | |
6.52 | 4.65 | on | off | off | |
7.20 | 5.14 | off | off | off |
2. Quiescent current setting
The static current can be set with the SW4 DIP switch. Off means the static current is set to half of the dynamic current, and on means the static current is the same as the dynamic current. In general use, SW4 should be set to off to reduce the heat of the motor and driver and improve reliability. After the pulse input stops, the current is automatically reduced to half (the lock current percentage can also be set by the host computer software).
 Company Profile
Company Profile